
摆线精密传动是一种以短副外摆线的内等距曲线和圆弧为共轭齿廓的少齿差行星传动装置,具有传动比大、传动精度高、同时啮合齿数多、传动平稳噪声小、传动效率高等特点,因而在工业部门得到了广泛的应用,在整个减速器行业中也占有较大比例。尤其是进入20世纪90年代以来,由于摆线针轮传动较谐波传动具有更高的疲劳强度、刚度和寿命,在工业机器人等精密传动领域中得到了广泛应用。
在国外,摆线传动研究开展较早,目前处于领先地位的有日本、德国和美国,主要的研究团队有美国J.G.Blanche教授和日本日高照晃教授等。
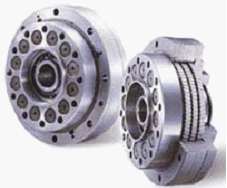
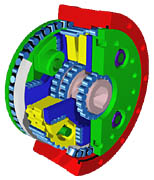
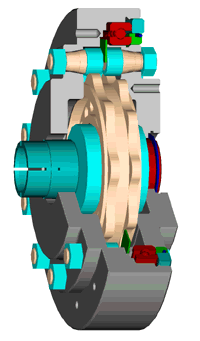
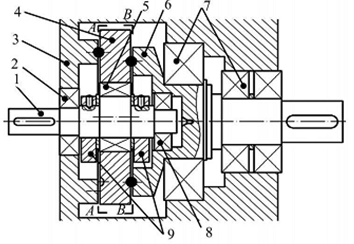
1926年,德国L.Braren教授在少齿差行星传动基础上,利用变幅外摆线内侧等距线发明了摆线针轮行星减速器,并进行了基础理论研究。1939年,日本住友重机械株式会社开始引进该技术,并在摆线轮修形和加工工艺方面进行了改进,从而使摆线针轮减速器进入实际工程应用阶段。1983年日本开始从事RV传动的研究,1986年日本帝人公司推出了偏心差动式RV系列减速机并获得专利,如图1. 1 所示。1987年,捷克Soucek.Josef提出在一块齿板上布置三个曲柄的内齿行星传动装置,并申请了专利,其结构如图1. 2所示。该结构的特点是单齿板传动不存在死点,但由于三套互成120°相位的双曲柄机构之间存在过约束,加工及装配误差容易导致附加冲击,引起振动和噪声,结构复杂,安装不便。1989年,英国学者提出了类似的少齿差传动装置,如图1. 3所示。该结构的特点是采用偏心套结构在一根曲柄上安装三个内齿板,结构复杂、加工精度要求高,而且在工作过程中,偏心套受交变扭矩作用,存在微动磨损,容易发热。
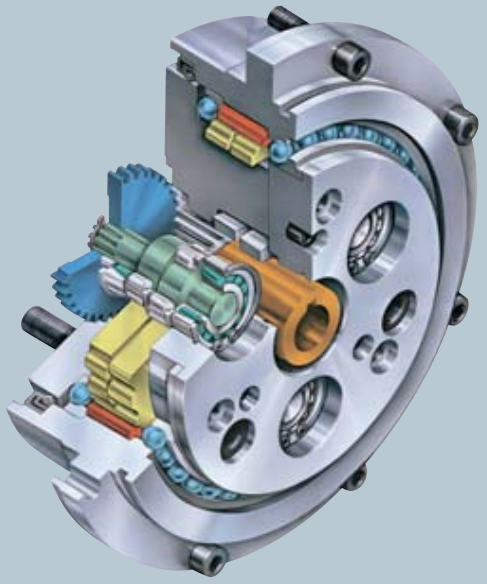
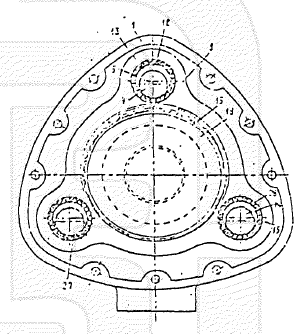
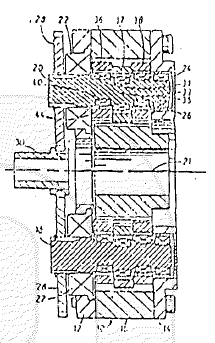
图1. 2捷克结构 图1. 3英国结构
近年来,各国学者提出了一系列的精密传动结构,如图1. 4所示,其中包括日本住友重机械株式会社研制的FA高精减速器和摆线钢球行星传动;2001年,斯洛伐克推出的TWINSPIN精密摆线减速器,该传动采用中空转子式输出,两端支撑采用交错滚子式轴承,因而又称为轴承减速器;美国Mectrol公司研发的100%消隙的Dojen减速器等。

(a)FA减速器 (b)摆线钢球减速器
(c)TWINSPIN减速器 (d)Dojen减速器
图1. 4 新型摆线类减速器
国内摆线传动研究起步较晚,上世纪六十年代开始研制摆线针轮传动,并于 1981 年制订了摆线针轮减速器标准系列(JB2982-81)。由于材料品质和工艺水平较国外存在一定差距,特别是在大功率减速器方面普遍存在使用寿命不长的问题,大型减速器(500Kw以上)主要从国外进口。主要的研究机构有大连交通大学、重庆大学、哈尔滨工业大学、上海交通大学等。
常规K-H-V型少齿差行星传动如图1. 5所示,存在转臂轴承径向力大、传动效率和承载能力低、轴承使用寿命受限制等缺陷。1979年,郑州工学院机械原理及机械零件教研室编写了《摆线针轮行星传动》一书,详细介绍了摆线针轮传动的啮合原理、结构设计、受力分析和强度计算方法,极大的促进了摆线针轮传动在我国的发展和应用。
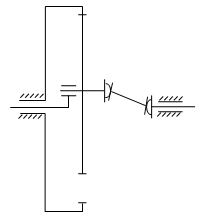
Fig.1. 1 K - H –V type transmission
1997年,RV减速机研究被纳入国家863高技术研究发展计划,其理论研究内容涵盖受力分析、运动学分析、传动效率计算、动力学特性研究等。2000年,何卫东、李欣等人提出了双曲柄环板式针摆行星减速器,如图1. 6 所示,应用行星轮系传动效率的通用计算公式,推导出了传动效率计算公式。同年,何卫东、李力行提出了“负等距+负移距”机器人用两级同轴摆线精密传动中摆线轮齿形优化新算法。2005年,大连交通大学关天民对FA型摆线针轮行星传动齿形优化方法与相关理论的进行了研究,提出了各种修行方式下较准确的摆线轮齿面受力分析方法。
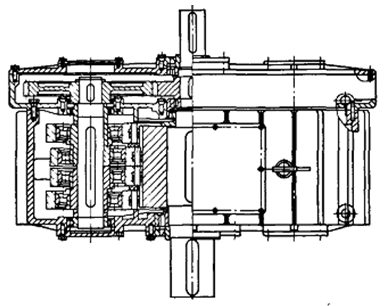
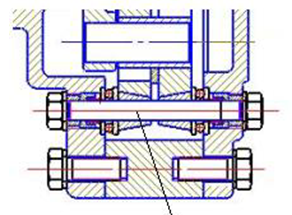
图1. 6 双曲柄环板式针摆行星减速器 图1. 7自动调隙机构
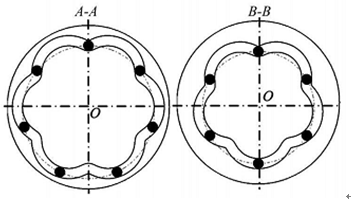
2008年,重庆大学陈小安教授针对传动中啮合间隙不能自动补偿的现状,开展了自动调隙摆线针轮行星传动的研究,如图1. 7所示,并对其运动特性进行分析。重庆大学陈兵奎分析了典型一次包络一齿差、二齿差、三齿差、负一齿差摆线针轮行星传动的啮合理论和结构特点如图1. 8(a)、(b)所示,在此基础上,提出一种二次包络摆线行星传动,如图1. 8(c)、(d)所示,加工制造了样机并且进行了理论分析和实验研究,结果表明该新型传动具有双线接触的特性,而且具有较高的传动精度和扭转刚度、较低的回差。

(a)二齿差结构 (b)三齿差结构
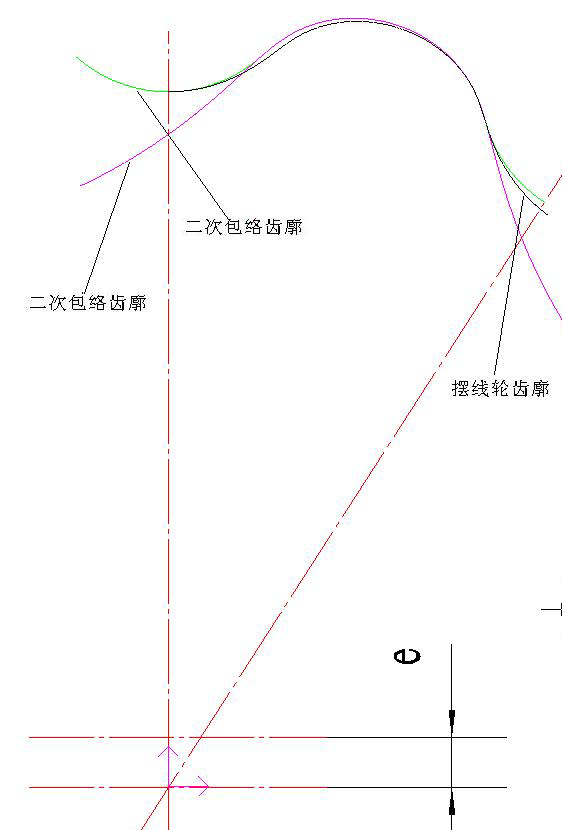
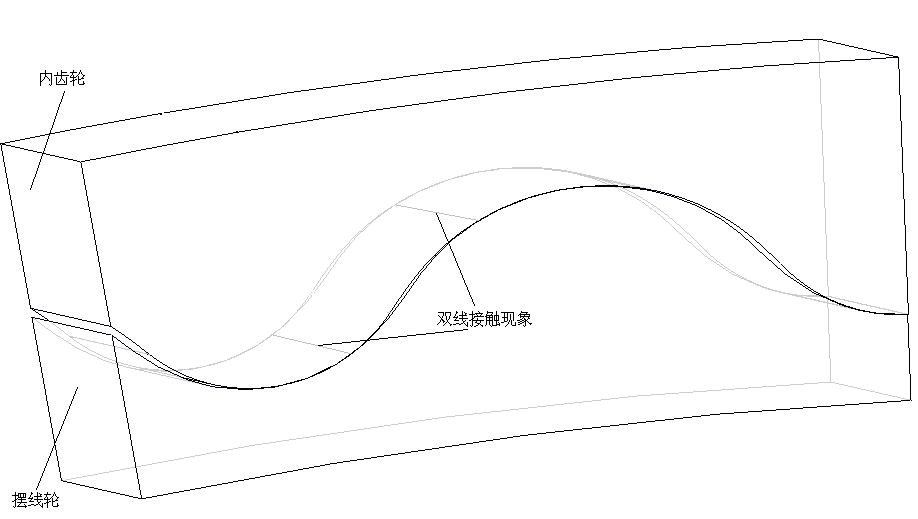
(c)二次包络齿形图 (d)二次包络双线接触示意图
图1. 8二次包络齿形示意图
Fig.1. 2 Double enveloping tooth profile
2010年,朱才朝提出一种新型定轴摆线精密传动装置如图1. 9所示,并对其承载能力、传动精度、效率进行了分析;何卫东、李欣等对双曲柄环式针摆行星传动进行了实验研究,提出了降低振动噪声的齿形优化方法。鲍君华提出了采用针轮作为输出构件的针轮输出摆线针轮行星传动的新型传动形式,如图1. 10所示,对其工作原理进行分析,对虚拟样机的动力学性能进行了仿真分析和有限元模态计算,为实体样机的制造和参数的优化提供了理论基础。
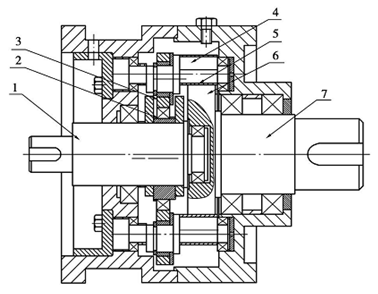
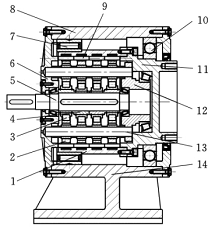
图1. 9 新型定轴摆线传动 图1. 10针轮输出针摆行星传动
Fig.1. 3 New type cycloidal speed reducer Fig.1. 4 Cycloid planetary reducer
1.主动轴 2、5、7、8.轴承 3. 箱体 4.摆线轮 6.输出轴 9.配重
图1. 11摆线钢球行星传动机构简图
2011年,朱斌利用adams对2K-V型摆线针轮减速器的动态回差进行了分析,得出一级传动法向齿侧间隙对回差影响不大,二级摆线轮修形产生的间隙和转臂轴承间隙是影响回差的主要因素;同年,陈厚军提出一种以钢球为啮合件的一齿差摆线行星传动,如图1. 11所示,对其基本结构与传动原理进行了讨论。2012年,为了解决摆线针轮传动啮合过程中既滑又滚的问题,北京邮电大学廖启征提出在摆线齿廓上叠加小齿,如图1. 12所示,利用齿轮啮合原理推导了齿廓方程,并制造了样机;朱才朝提出一种汇集活齿传动、内摆线传动的新型两级活齿减速传动装置和两级锥形内摆线传动装置并申请了国家发明专利,如图1. 13和图1. 14所示。
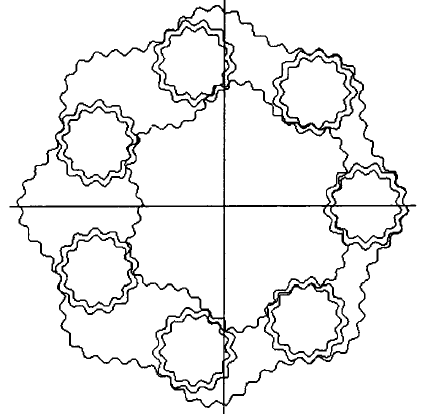
图1. 12叠加小齿的齿形示意图
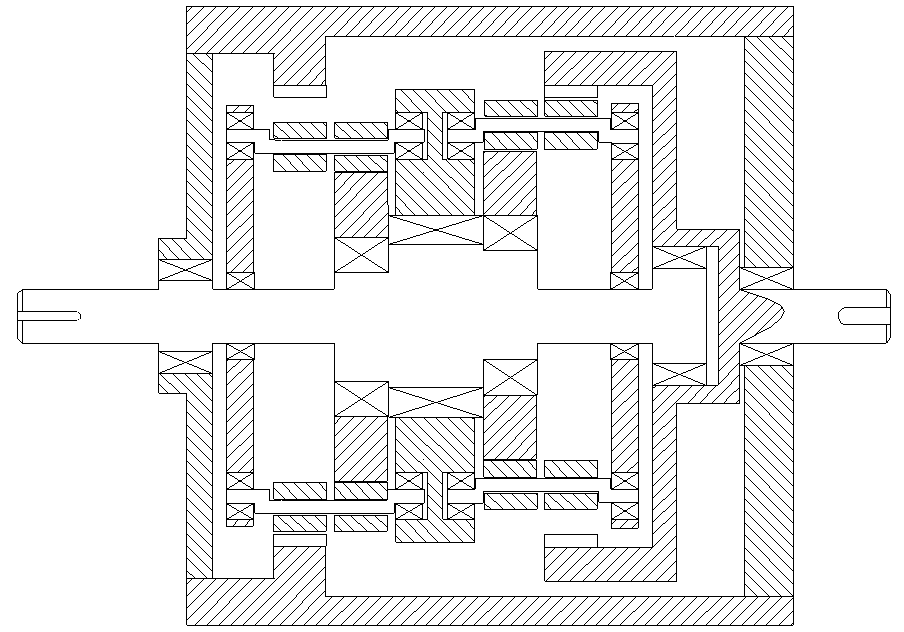
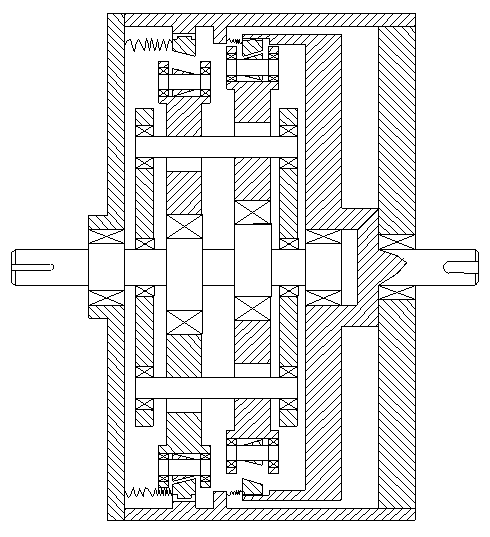
图1. 13两级活齿减速传动装置 图1. 14两级锥形内摆线传动装置
上世纪90年代以前,摆线针轮行星传动主要应用于通用传动领域,随着研究的不断深入,其应用范围不断开拓,在微型机械、机械人传动装置、宇航设备、测量仪器和住宅智能化等方面都有一定的应用。目前,主要由日本住友重机械株式会社占据主导地位,其总的发展趋势为:
1) 重量更轻,结构更紧凑。减速器一级传动比可达6~119,二级传动比可达104~7569,三级传动比可达9251~658503。
2) 更大的传递功率。最大传递功率可达132KW,输入转速1800r/min,采用结构优化设计,减速器单位体积所传递的扭矩不断提高,如图1.18所示。
3) 更高的传动效率。由于机构间为滚动接触,一级传动达到 95% 以上,二级传动可达 85% 以上。
4) 运转更平稳,噪声更小。采用齿形优化设计,使轮齿间啮合率进一步提高,同时在负荷传递部分进行高精度的齿形研磨加工,减速器运转更平稳流畅。
5) 新结构的应用。从齿廓上看,采用了二齿差结构、三齿差结构、微变幅结构、复合齿形结构、针齿卧枕式结构等;从摆线轮的数目上看,根据不同场合采用单片、两片、三片摆线轮;并采用了有限元均衡设计、模糊优化设计等新方法,使得减速器的结构更合理,齿形的利用率达到最佳。
图1. 15不同系列摆线针轮减速器外形比较